

[DIY] Gimli — terenowy robot inspekcyjny
Gimli to imię jednego z bohaterów Trylogii Władcy Pierścienia i nazwa mojego drugiego robota inspekcyjnego zaraz po SPiBot—cie (który de'fakto mam prawie ukończony więc wpis o nim również ukaże się niebawem). Sam projekt robota nie jest może zbyt ambitny i nie uratuje świata ani go nie podbije, ale przyda się do zabawy i sprawdzenia np. podwozia samochodu.

Elektronika
Do sterowania robotem wykorzystam Raspberry Pi wraz z modułem kamery NOIR, który będzie strumieniować obraz na żywo. Dodatkowo do sterowania samymi silnikami wykorzystam atmega8 aby nie obciążać tym maliny. Sama kamera będzie obracana w pionie o 180 stopni. Sterowanie samym robotem odbywać będzie się na dwa sposoby. Pierwszy za pomocą sieci zaś drugi to komunikacja radiowa. Dodatkowo dojdzie GPS i akcelerometr.
Sterownik silników DC
Silnikami będzie sterować dwukanałowy chiński sterownik do silników DC. Domyślnie sterownik obsługuje natężenie do 10A (do 30A przy krótkotrwałych skokach) na kanał oraz napięcie od 6V do 24V. Sam układ logiczny zasilany jest napięciem 5V.

Sygnał PWM do sterownika będzie wysyłany za pomocą mikrokontrolera ATtmega8.

W ostatnim wpisie o Intel Edisonie przedstawiłem sterowanie tym sterownikiem. [youtube=https://www.youtube.com/embed/AP1jhQnH0pI]
Napęd
Robot poruszać się będzie na czterech kołach. Sterowanie kierunkiem odbywać się podobnie jak w czołgu czyli prawe koła lub lewe obracają się szybciej wg potrzeb.
Koła
Koła o rozmiarach 18cm x 8,5cm (skala 1:6) dedykowane są do modeli RC. Są to chyba największe koła jakie zdołałem znaleźć w sklepach. Standardowo łatwiej dostać koła o około 12cm wysokości.

Jak widać na zdjęciu koła są dość spore na tle Raspberry Pi. Opony są w środku puste, ale sama guma jest wystarczająco twarda aby utrzymać całego robota na czterech kołach. W razie potrzeby zamierzam wypełnić środek jakąś pianką lub kulkami styropianu.
Silniki
Silniki pochodzą od wkrętarek 18V razem z przekładniami planetarnymi. Same silniki są oznaczone jako model RS‑550s



Przekładnia posiada sprzęgło, które zablokowałem całkowicie. Wystarczyło ściągnąć przedni mechanizm, wyciągając kulki i wkręcić w te miejsce kilka śrubek aby na sztywno zablokować sprzęgło.

Przełożenie napędu na koła
Każdy z silników będzie napędzać jedną stronę kół. Sterowanie będzie się odbywać identycznie jak w czołgu czyli gdy jedna ze stron będzie się obracać szybciej to pojazd będzie się skręcać w przeciwną stronę.
Pudło (obudowa)
Elementy do budowy obudowy robota przygotowałem w programie QCad a następnie wysłałem do jednej z firm do wycięcia w aluminium.

Po odebraniu wyciętych elementów zabrałem je do szwagra, który jest mistrzem w spawaniu (co jak co ale wszystkiego nie potrafię ;)).

Zaczęliśmy od ustawienia spawarki i próbie spawów na dodatkowym elemencie blachy.


[join][img=przyg(3)][join][img=przyg(4)]
Po ustawieniu poprawnie spawarki pora na spawanie elementów. Ja głównie zajmowałem się co prawda trzymaniem elementów i robieniem zdjęć ;)



[join][img=spawanie(4)][join][img=spawanie(5)]
Po zespawaniu obudowy trzeba było przeszlifować spawy oraz same blachy tak aby je fajnie zmatowić.


[join][img=szlifowanie(3)][join][img=szlifowanie(4)][join][img=szlifowanie(5)][join][img=szlifowanie(6)]
Pozostało nam jeszcze zamontować górną klapę, która będzie przykracana. Klapa będzie przykręcana do kątowników, które przyspawaliśmy na kantach ścian bocznych.


[join][img=katowniki(3)][join][img=katowniki(4)]
Po przyspawaniu kątowników wystarczyło tylko zrobić dziury oraz nagwintować je.

[join][img=katowniki(7)][join][img=katowniki(8)]
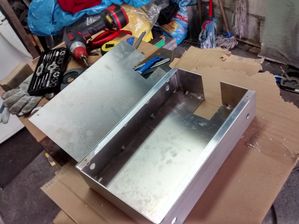
Dodatkowo zmatowiliśmy klapę oraz poprawiliśmy szlify kantów.


Na koniec przykręciliśmy blachę a sama obudowa prezentuje się tak:


Podsumowanie
Na razie zakończę na tym etapie wpis. Przygotowana mam już obudowę, koła, silniki oraz sterownik silników. Teraz zabieram się za zaprojektowanie uchwytów na silniki i ośki na koła oraz przygotowanie układu, który tym wszystkim będzie sterować. W drugim wpisie pokażę jak wszystko połączyłem i uruchomiłem robota :)






