

DIY — budujemy własną miniwycinarkę CNC cz.2
Po pierwszym etapie budowy urządzenia do frezowania i wycinania zabrałem się za dalszą pracę z elementami mechanicznymi. Tym razem musiałem zamontować uchwyt na wrzeciono, napęd poruszający elementy po prowadnicach jak również zabrać się za przygotowanie i podłączenie elektroniki.

Mechanika
Uchwyt na wrzeciono
Wrzeciono oprócz poruszania się w prawo i lewo na osi X powinno się też podnosić i opuszczać. Dlatego zabrałem się za montaż prowadnic oraz włożenia łożysk liniowych do uchwytu wrzeciona. Po tym nałożyłem uchwyt na prowadnice. Teraz pora na elementy napędzające.


[join][img=nawrzec3][join][img=nawrzec4]
Pręty gwintowane
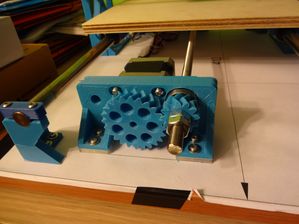
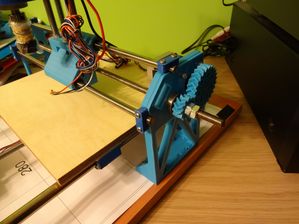
Do poruszania stołem i wrzecionem, które jeżdżą po prowadnicach wykorzystywane są pręty gwintowane 8mm. Do prętów za pomocą nakrętek przykręcone są zębatki. Całość zaś jest obracana na łożyskach kulkowych. Silniki krokowe mają obracać pręt i poprzez śrubę przymocowaną do stołu czy uchwytu wrzeciona nim poruszać.
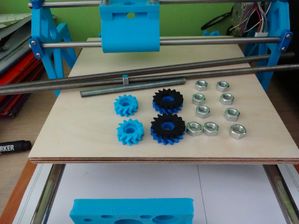
Na wycięte pręty (2x 400mm i 1x 150mm) pozakładałem zębatki i podokręcałem nakrętki a następnie wsunąłem przez łożyska do elementów montażowych i skręciłem z obydwu stron.
[join][img=zebatki6][join][img=zebatki7][join][img=zebatki4][join][img=zebatki5][join][img=zebatki2][join][img=zebatki3][join][img=wydruk][join][img=wydruk2]

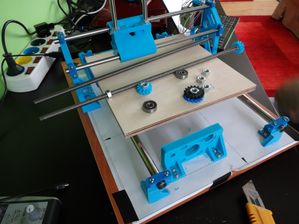
Po skręceniu prętów pora na montaż silników z zębatkami.
Silniki krokowe
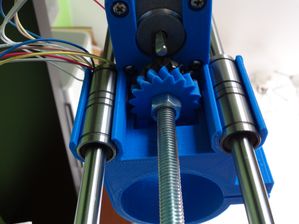
Choć posiadałem w domu silniki krokowe, które dotychczas można było zauważyć na zdjęciach, okazały się one niewystarczające ze względu na zbyt krótki trzpień oraz za wysokie napięcie pracy (24V). Zmuszony byłem kupić trzy silniki krokowe NEMA17 dla osi X i Y i Z. Silniki pracują z prądem 12V/1A.

Silniki posiadają cztery kabelki - 1A (pomarańczowy), 2A (czarny), 1B (niebieski) i 2B (biały).
1 krok to obrót silnika o 1,8 stopnia (200 kroków na pełen obrót).

Po przykręceniu silników do uchwytów zająłem się zamontowaniem zębatek na silniki i dokręceniem wszystkich śrubek i nakrętek.
[join][img=zebatka3][join][img=zebatka4]
Urządzenie jest już gotowe mechanicznie. Teraz pora na elektronikę.
Elektronika
Wiem, że obiecałem opisać schemat podłączenia, ale niestety wpis byłby zbyt długi. Dlatego postanowiłem przedstawić wszystkie elementy, które będą nam potrzebne do złożenia wszystkiego w całość.
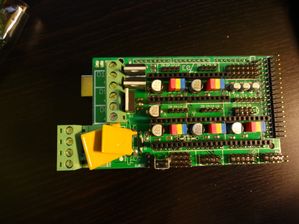
Sterownik silników krokowych
Do sterowania silnikami krokowymi wybrałem sterownik A4988. Sterowniki należało zlutować a następnie przykleić im radiatory. Poniżej krótki filmik z lutowania nocną porą sterowników do silników. Nie jest to takie trudne, co? [youtube=http://www.youtube.com/watch?v=GF__sZSbVQk]
Zasilacze przemysłowe
Do zasilenia całości potrzeba dwóch zasilaczy. Pierwszy 12V/5A/60W do zasilania Arduino z modułem i samych silników krokowych. Zaś do wrzeciona potrzeba znacznie mocniejszego silnika 48V/8,3A/400W.


Zasilacze oczywiście musiałem sprawdzić. Wykorzystałem do tego wiatrak z komputera na 12V oraz same wrzeciono.
Arduino i RAMPS 1.4
Jak już wspominałem w pierwszej części, za sterowanie urządzeniem odpowiadać będzie Arduino Mega z modułem RAMPS 1.4.

Przygotowanie RAMPS i instalacja Firmware
Instalacja firmware na Arduino Mega jest prostym zabiegiem. Pobieramy firmware z repozytorium GitHub (obecnie wersja 1.0.0 Beta 1). Rozpakowujemy i przechodzimy do rozpakowanego katalogu Marlin-Marlin i dalej przechodzimy do katalogu ArduinoAddons>Arduino_1.x.x w którym znajdują się potrzebne biblioteki (katalog libraries). Kopiujemy katalog libraries do katalogu Arduino IDE w Windowsie w katalogu użytkownika w Dokumenty/Arduino (w Linuksie w katalogu użytkownika w folderze sketchbook). Następnie wystarczy odpalić Arduino IDE wybrać odpowiednią płytkę Arduino MEGA 2560/ADK i port. A następnie wczytać plik Marlin.pde z katalogu Marlin a następnie skompilować. Gdy nie ma błędów kompilacji wysyłamy do urządzenia.

Po zakończeniu kompilacji i wgrywania możemy zająć się podłączeniem modułu RAMPS, który wciskamy do złącz w arduino


Koniec etapu 2
To tyle w tym etapie, który był dla mnie pracochłonny ze względu na mniejsze elementy, których montaż wymagał większej sprawności i sprytu. Pozostało już podłączenie całej elektroniki ze sobą (wraz z upakowaniem tego w jakąś obudowę), kalibracja urządzenia i pierwsze testy frezowania w materiale. Do zobaczenia w następnej, ostatniej już części :)
Ja zwykle przedstawiam krótki filmik z budowy. [youtube=https://www.youtube.com/watch?v=pYNJo5XySBQ]


![Zapowiadał się kosmiczny Frostpunk, wyszedł niespójny builder. Ixion [Recenzja]](https://v.wpimg.pl/OWFhLmpwYDYnCjpeXwxtI2RSbgQZVWN1M0p2T19CdmA-W39bXwMqNC5GOx0TEyF5NgRjBB0QYDJ-Wn9YRRIteiNceVRdQ3xvd0V0XBNPYmN3WX9dFE4qZn8JLUMaByh1Ow)
![Survivalowy mikrokosmos debiutuje. Smalland: Survive the Wilds [Recenzja]](https://v.wpimg.pl/MDdlLmpwYiUFDjpeXwxvMEZWbgQZVWFmEU52T19CdHMcX39bXwMoJwxCOx0TEyNqFABjBB0QYnJTDSpaQEF5aVZYKF1dQ3l0AUEtW0BCYCJTCChaSUN8dlRbKUMaBypmGQ)

