

Xiaomi Mijia Roborock Vacuum Cleaner 2 (S502-00) — test robota sprzątającego (AKTUALIZACJA)
Odkopałem temat jednego z wpisów od @eimi, a ponieważ niedawno zakupiłem nowszą, drugą odsłonę robota sprzątającego postaram podzielić się swoimi doświadczeniami z tym urządzeniem.
AKTUALIZACJA:
Po ponad dwóch latach od wydania modelu S50/S5 producent postanowił przygotować większą aktualizację zarówno firmware jak i samej aplikacji do robota sprzątającego. Upodobnił ją do aplikacji znanej z nowszych modeli S6/S6 Pure i S5 Max dodając również sporą część ich funkcjonalności.

Lista zmian w wersji 3.5.7.002008 oprogramowania to m. in. :

- nowy interfejs map
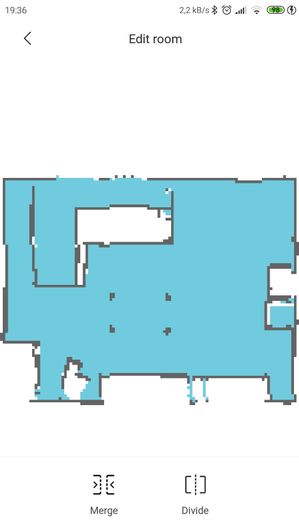
- możliwość podziału mapy na konkretne pomieszczenia
- poprawiony algorytm (adaptacyjny) efektywności sprzątania (już po pierwszym sprzątaniu z nową wersją firmware mogę stwierdzić, że robot zachowuje się "racjonalniej" przy przeszkodach typu nogi od stołu sprzątając przy nich jednym ciągiem)
- poprawki błędów
Nowy wygląd interfejsu aplikacji:

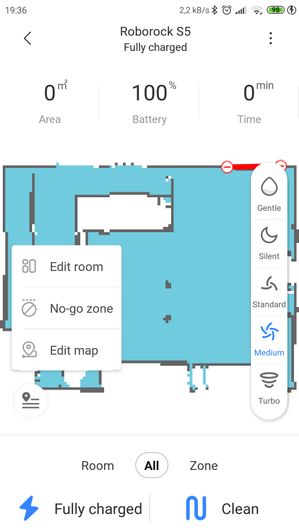
- możliwość wyboru mocy ssania bezpośrednio z widoku mapy (także trybu "gentle" do mopowania, pod warunkiem, że w opcjach jest włączony jako widoczny)
- ilość cykli sprzątania można ustawić nie tylko dla stref, ale i danych pomieszczeń
- funkcje edycji pomieszczeń, mapy i stref "no‑go" w jednym rozwijanym menu
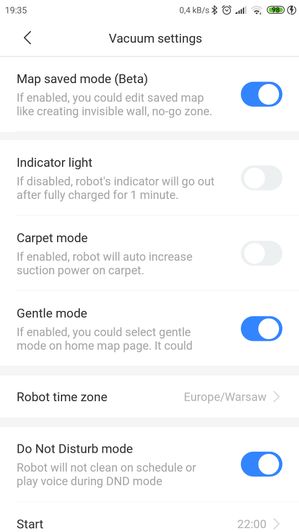
- kopia zapasowa map pomieszczeń
- możliwość wyłączenia podświetlenia przycisku "Power" jedną minutę po naładowaniu się robota (przydatne, gdy mamy robota w pomieszczeniu gdzie śpimy lub drażnią nas diody)
- intuicyjny podział widoku na możliwość sprzątania konkretnych pomieszczeń/pomieszczenia, całości mieszkania/domu i konkretnych stref
Dzięki nowej funkcjonalności można tworzyć wyzwalacze czasowe także z podziałem na konkretne pomieszczenia, a także głosowo poprzez Asystenta Google wyzwalać sprzątanie w danym pokoju.
Konkluzja:
Bardzo ładnie ze strony producenta, że część funkcji z nowych modeli robotów sprzątających znalazła się w starym modelu, poprawiając nie tylko jego funkcjonalność, ale i skuteczność sprzątania (nowy algorytm). Również odświeżony wygląd aplikacji ułatwia zarządzanie urządzeniem.
Wątpię, żeby inny producent (np. mający w nazwie pewną figurę geometryczną) postąpił równie fajnie i po tak długim czasie wprowadzał nowsze funkcje/rozwiązania do starszych modeli. #Xiaomilepsze ;)
Podstawowe różnice w stosunku do pierwszej generacji robota
- przebudowana, pomniejszona stacja dokowania
Oprócz znacznego zredukowania wielkości stacji ładowania złącza ładowania przeniesiono ze ścianki na dolną cześć stacji ładownia. W wersji pierwszej nadmiar kabla można było schować w "matce", w przypadku nowej mamy jedynie tasiemkę na rzep do spinania nadmiaru kabla.
Kolejna istotna różnica to brak dziwnego ruchu "wpychania się" robota przy parkowaniu.
Do nowej stacji ładowania dołączona jest także plastikowa przeźroczysta podstawka pod robota, aby woda z mopa w miejscu ładowania nie sączyła się na podłogę.

- zbiornik na wodę i mop - funkcja mopowania
Dosyć innowacyjne podejście do tematu mopowania. Podczas gdy większość robotów z taką funkcją ma wymieniany pojemnik na kurz i osobny na wodę w robocie Xiaomi jest to płaski pojemnik z mopem wsuwany pod tylną część robota. Umożliwia to jednoczesne odkurzanie, a następnie od razu mopowanie podłogi bez konieczności wymieniania pojemnika na kurz.

Dystrybucja wody obywa się poprzez wymienne "kraniki", gdy się zużyją zmieniają swoją barwę na kolor szary.
Początkowo podchodziłem do tego systemu mopującego dosyć sceptycznie, ale rzeczywiście woda jest dostarczana równomiernie na powierzchnię mopa, który mocujemy wsuwając dolną część w rowek pojemnika, a górę przyczepiając na rzepy. Absolutnie nic się nie wylewa, nie kapie, a woda jest dozowana dosyć regularnie.
W instrukcji jest wyraźnie zaznaczone, że wolno do pojemnika wlewać tylko czystą wodę, a mop zakładać już nawilżony. Nie ma za to mowy o nie stosowaniu detergentu bezpośrednio na mopa, więc nasączam go wodą z rozrobionym detergentem. Woda z pojemnika przechodzi przez mopa rozcieńczając detergent i mamy chociaż korzyść w postaci ładnego zapachu.
Oczywiście nie zastąpi to tradycyjnego wiadra z wodą. ale zbiera znaczną część kurzu z powierzchni płaskich i nadaje nieco świeżości, a także zmywa pomniejsze plamki z podłogi.
- regulowana moc ssania i automatyczny tryb dywanów
Obecnie tak jak wyższych modelach iRobot ROOMBA można wybrać moc ssania pomiędzy: cichy, zbalansowany (domyślny), turbo i maksymalny, możemy również włączyć funkcję wykrywania dywanów, wówczas robot automatycznie zwiększy ciąg podczas, gdy wjedzie na dywan. Zwiększono również moc ssania z 1800 do 2000 Pa w stosunku do poprzedniego modelu i przyda się to głównie podczas sprzątania dywanów.

- więcej czujników i udoskonalony LDS
Dodano m. in. sensor nacisku. Robot nie zaklinuje się w miejscach gdzie wysokość prześwitu zmniejsza się np. w wyniku nierówności, nietypowych kształtów.
W poprzedniej generacji przedni czujnik był ultradźwiękowy, obecnie zastąpiony jest lepszym - czujnikiem optycznym.
Laser mapujący otoczenie (LDS) jest teraz udoskonalony i precyzyjniej mapuje pomieszczenie, a także obecnie wspomaga nawigację do stacji ładowania, szczególnie przydatne, gdy robot znajduje się w innym pomieszczeniu niż stacja ładowania.
Robot radzi sobie teraz doskonale z czarnymi powierzchniami, a czujniki odległości są bardziej wyczulone pozwalając na wciśnięcie się w miejsca prawie na styk z średnicą robota.
- możliwość wyznaczania wirtualnych stref sprzątania
Chyba największa nowość, czyli możliwość ustalania miejsc do posprzątania bezpośrednio na sporządzonej mapie pomieszczeń w smartfonie. (przez system LDS)

To rozwiązanie eliminuje konieczność stosowania wirtualnych ścian na podczerwień.
Po prostu zaznaczamy interesujący nas obszar lub obszary na mapie i ustalamy ilość przebiegów jakie ma wykonać robot w tych miejscach.
Możemy też wskazać miejsce na mapie do którego robot ma podjechać i sterować ręcznie. (działa po WiFi)
- zwiększona możliwość pokonywania przeszkód
W poprzedniej odsłonie robot pokonywał przeszkody do 1.5 cm, ale różnie to z tym bywało. Obecnie producent podaje wartość 1.8 cm, a testowałem nawet 2 cm nie jest dla niego problemem, więc powinien poradzić sobie z progami i dywanami z wysokim włosiem, pod warunkiem, że zbiornik z mopem nie jest podczepiony.
- nowy filtr HEPA i nieco większy pojemnik na kurz
Poprzedni robot posiadał filtr HEPA (o skuteczności filtracji 99%) i był to filtr, którego nie można było myć.
Obecnie zastosowany jest filtr HEPA E11 (o skuteczności filtracji 95%), jest on pokryty cieniutką warstwą teflonu i można go przepłukać pod bieżącą wodą. Oczywiście producent zastrzega, że nie można używać do tego mechanicznych narzędzi typu palec lub pędzel. Najzwyczajniej wlewamy wodę do pojemnika potrząsamy i tyle. Po tym zabiegu filtr musi suszyć się 24 godziny, ale mamy zapasowy w zestawie, więc możemy używać zamiennie.
Nie oznacza to, że filtra nie trzeba wymieniać na nowy, ale przez to można zachować większą sprawność jeżeli chodzi o moc ssania.
Dużym plusem jest to, że szczotki, jak i filtr pasuje z poprzedniej generacji robota. Pojemność zbiornika zwiększono z 420 ml do 480 ml. Nie dużo, ale zawsze coś.
- inne różnice
Głośność: 54 / 67 dB (gen. 2) vs 61 / 72 dB (gen. 1)
Waga: 3.5 kg vs 3.8 kg
Możliwość jazdy: do 20 stopni vs 15 stopni nachylenia
Odkurzanie i mopowanie - test
Zacznijmy od usytuowania stacji dokującej. Według producenta powinno być to co najmniej 0.5 m z lewej i prawej strony i więcej niż 1.5 m przestrzeni przed stacją dokującą.
Zachowanie takich odstępów niestety nie w każdym przypadku jest możliwe i tak właśnie jest u mnie, ale robot i tak sobie radzi z dokowaniem. Jedynie, gdy ręcznie przeniosę robota w inne miejsce w pokoju i nacisnę przycisk dokowania to zazwyczaj 1‑2 razy robot koryguje swoją pozycję, aby trafić w złącza ładowania. Przy normalnym powrocie po skończonej pracy bezbłędnie trafia pomagając sobie mapą sporządzoną przez LDS.

Nie będzie to typowy test, gdzie bez opamiętania sypię confetti, mąką lub innego typu śmieciami o sztucznym skupieniu i zagęszczeniu. Testowaną nawierzchnią będą panele z fakturą nie odkurzane 7 dni. Powierzchnia pokoju 25 m2, powierzchnia użytkowa dla robota do uprzątnięcia to 14 m2.
- Etap pierwszy
Robot zaczyna od obrotu (rozglądania się w lewo i prawo) tworząc początkową, niedokładną mapę pomieszczenia, a następnie standardowo objeżdża pokój dookoła dzieląc jednak go w moim przypadku na 2 strefy. (optymalizacja algorytmu)

- Etap drugi
Teraz mając już dokładną mapę pomieszczenia robot zaczyna poruszać się znacznie szybciej wypełniając niejako obrys "wężykami".
Przy tym etapie mam wrażenie, że algorytmy w jakiś sposób weryfikują umiejscowienie drzwi, ponieważ robot za każdym razem zagęszcza tam swoją ilość przejazdów.
- Rezultat odkurzania i mopowania
Trudno jest wykazać wynik skuteczności robota zdjęciami, ale myślę, że w jakimś stopniu będzie to widoczne.


- Przeszkody
Postanowiłem postawić dwa typy przeszkód i zaobserwować jak zachowa się robot.
Pierwszą z nich była karta okolicznościowa. W końcu inteligentny robot nie powinien omijać takiej przeszkody podobnie jak firanki sięgające po samą ziemię.
Rezultat był zgodny z oczekiwaniami, robot przesunął kartkę do pierwszej fizycznej przeszkody niemożliwej do przesunięcia przez urządzenie.
Druga przeszkoda była już bardziej wymagająca i była to butelka wody. Laser jak wiadomo przez tego typu obiekty może źle zinterpretować przeszkodę. Zadziałał jednak czujnik optyczny na przodzie robota i butelka została lekko trącona, przesunięta ok. 1 cm, a następnie objechana dokładnie dookoła. Przy drodze powrotnej robot już "pamiętał" rodzaj i umiejscowienie przeszkody i najzwyczajniej ją ominął.
Testowałem również poruszanie się przez różnej wysokości przeszkody i robot potrafił wjechać na te nie przekraczające 2 cm wysokości.
- Napotkane problemy
Mam akwarium na szafce z kółkami skrętnymi. Od prawej strony robot się nie przeciśnie przez zbyt ciasny rozstaw. Bezbłędnie objeżdża szafkę i dostaje się pod nią od przodu.
Niestety dorobione skrętne kółka mają dosyć nieregularny kształt, ostrą krawędź pierścienia i zauważyłem otarcia na plastiku w pobliżu przedniego i bocznego czujnika odległości na robocie.
Nie radzę sobie z obróbką metali, więc naprawiłem problem oklejając ostre krawędzie taśmą klejącą. Po dokładniejszych obserwacjach robot będąc w tak ciasnym miejscu bada otoczenie korzystając też z czujnika "zderzeniowego", aby dotrzeć możliwie jak najdokładniej do zakamarków.
Drugi może nie problem, ale ciekawostka to niewidzialna kolumna głośnikowa. Przy pierwszym etapie rozpoznawania otoczenia wyjeżdżając zza komputera robot natrafia na kolumną ustawioną nieco pod kątem w stosunku do komputera i nie utrzymuje dystansu 10 mm jak w przypadku innych miejsc trafiając w nią zderzakiem. Oczywiście nie uszkadza to politury obu urządzeń, ale jest nieco dziwne. Przyczyną jest tutaj materiał z jakiego jest wykonana maskownica przednio przepustowego głośnika niskotonowego. Pod pewnym kątem rozprasza ona w b. dużym stopniu promień lasera. Nie pomaga również czujnik optyczny, ponieważ gdy robot wychodzi zza zakrętu ma zaledwie ok 10 cm na reakcję i optyka łapie przeszkodę, gdy jest już za późno. (w przypadku drugiej kolumny już jest bezbłędnie)
Od strony aplikacji Mi Home znowu dosyć irytujące jest znikanie mapy przy odsyłaniu robota do stacji dokowania przyciskiem "Dock" lub po sterowaniu ręcznym.
Podsumowanie
Urządzenie kupiłem z czystej ciekawości i z bardzo dużą rezerwą, co do skuteczności sprzątania. (a początkowo miałem kupić najnormalniejszy w świecie odkurzacz)
Finalnie w moim przypadku produkt spełnia oczekiwania i wracając późno z pracy podłoga jest po prostu czysta i ładnie pachnie, a przy okazji zaoszczędziłem trochę miejsca. Kurzu w pomieszczeniu jest znacznie mniej.
Można go nabyć w podobnej cenie do iRobot ROOMBA z serii 600, a przy tym oferuje znacznie więcej moim zdaniem.






